- An Introduction to Self-Driving Car
- Machine Learning Algorithms and Techniques in Self-Driving Cars
- Localization for Self-Driving Cars
- Perception for Self-Driving Cars
- Hardware and Software Architecture of Self-Driving Cars
- Sensor Fusion for Self-Driving Car
- Self-Driving Car Path Prediction and Routing
- Self-Driving Car Decision-Making and Control System
- Cloud Platform for Self-Driving Cars
- Dynamic Modeling of Self-Driving Car
- Safety of Self-Driving Cars
- Testing Methods for Self-Driving System
- Operating Systems of Self-Driving Cars
- Training a YOLOv8 Model for Traffic Light Detection
- Deployment of Self-Driving Cars
Self-Driving Car Path Prediction and Routing | Self Driving Cars
Path planning is a technique used by autonomous vehicles to plan their motions and navigate through their surroundings. Even while going to the same location, self-driving vehicles frequently take different routes than human drivers. When route forecasts are incorrect, dispatch choices are difficult to make, and individual vehicle performance degrades if vehicles are not directed by an intelligent traffic-aware routing engine.
How is Path Planning done?
Path planning for self-driving cars is no longer only about finding the shortest route from one location to another. In order to identify the safest, most convenient, and efficient route, path planning technologies are used. Simply put, route planning is based on two essential elements: moveable object behavior prediction and vehicle behavior planning, both of which self-driving cars use on a daily basis.
Analysis static obstacles
On the way to the destination of a self-driving car, there might be some static obstacles on the road. Self-driving cars use cameras, radar to detect objects and take necessary actions. For some obstacle, the car sometimes needs to change its lane, for some, it only slows down the speed and passes it. For the worst case, it needs to change its route and choose another route to reach the destination comfortably.
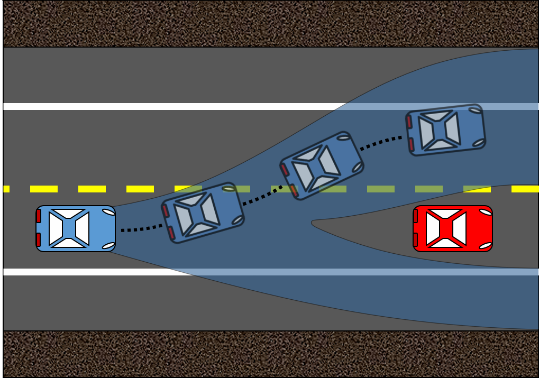
Predicting the behavior of moving objects
Multiple-model route planning algorithms for moving object tracking are used to anticipate the behavior of all dynamic objects in the space and corridor, and then estimate the trajectory of each object based on this, allowing ADAS capability to react quickly. These algorithms assess many alternative moves for each item at the same time, then correlate them with updated on-road observations received over the air. These algorithms predict the speed, velocity, lane, size of the vehicles on the road and try to predict their behavior and next moves.
Calculate path with minimal cost
Calculating cost algorithms provide a prediction output of every possible action. From that list of outputs, the car has to choose the best option or route. The algorithms analyze the pros and cons of every option. From the analysis, it has to select the most low-cost and efficient route.
Planning the safest path
Driving efficiency and the balance of safety and comfort are all part of vehicle behavior planning. Driving efficiency entails choosing the optimal lane to go to your destination as quickly as possible, while comfort entails getting to that lane in a timely and safe manner. The two basic aspects of vehicle behavior planning are hence ranking lanes and feasibility tests.
The algorithm is guided by three key concepts when it comes to lane ranking.
First and foremost, the fewer lane changes you do, the better.
Second, the greater the space between you and the moving item ahead of you, the better your maneuvering score will be.
Third, the quicker the automobile can travel in the lane, the faster the object in front of it is moving.
Once a decision has been made, decide the target speed and lane for that decision
After deciding the route and completing all the plannings the final calculation is done on the target speed and lane. The best lane and a comfortable speed are set using algorithms.
Path planning algorithms
- Voronoi diagram: This algorithm produces routes that optimize the distance between a vehicle and the barriers it encounters.
- Occupancy grid: In this method risk and feasibility is determined by the existence of barriers as well as lane and road limits.
- Cost maps: In this algorithm the higher the cost of a cell, the more intensely it is represented on the map.
- State lattices: This algorithm uses a grid generalization. Grids are made up of rectangles or squares that are repeated to discretize a continuous space, whereas lattices are made up of regularly recurring basic pathways that connect the vehicle's potential states.
- Driving corridors: This algorithm produces continuous collision-free areas limited by lanes and other barriers that the vehicle is anticipated to travel between.
Behavioral Planning Framework
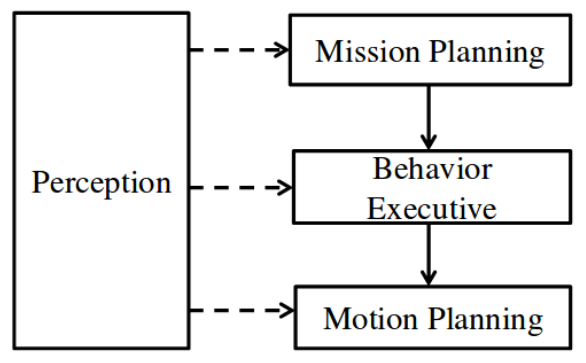
Hierarchical framework
The hierarchical paradigm for route planning allows autonomous vehicles to perform long-term missions while also reducing motion planning efforts. To put it another way, the hierarchical model improves the efficiency of path planning technology.
The input higher-level mission is broken into sub-missions for each tier of the hierarchical architecture and then sent to the next level below. Although the hierarchical model aids in the resolution of many complex problems, it may slow down the operation of a vehicle's feedback control and complicate the execution of complex maneuvers.
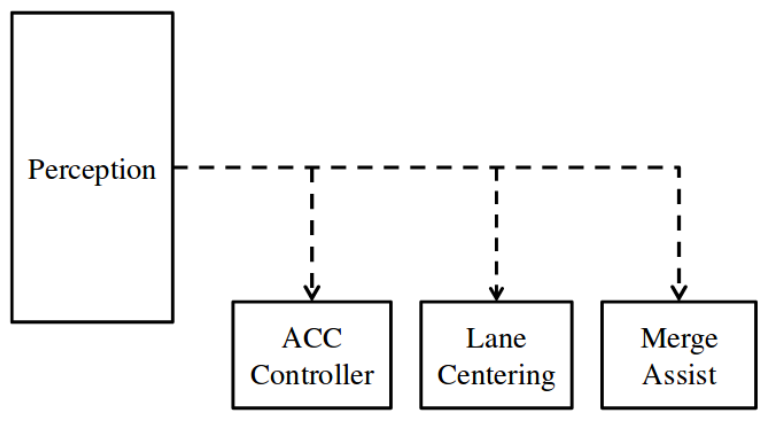
Parallel framework
The activities in the parallel framework for path planning are more autonomous and can happen simultaneously than in the hierarchical model. Each controller in this architecture has its own set of sensors and actuation mechanisms.
There are various advantages to using the parallel framework. To begin with, the controllers run at a high frequency, which makes them safe and stable. Second, the controllers provide excellent smoothness and performance. Third, the model is low-cost and does not necessitate the employment of complex motion planning systems.
Conclusion
Path planning and routing is an important task for self-driving cars. It can ensure a safe and comfortable journey if the car can predict the best path. The path planning algorithms are improving day by day to earn more trust and reliability.
Thank you for reading the article. Hope it gave you a quick overview of self-driving car path planning and routing techniques. Feel free to leave a comment below if you have any questions or suggestions about the post. Your feedback is always valuable to us.